For the source code of the project click here!
To see the simulation of the project click here!
Introduction – From Human Joints to MATLAB Simulation
Welcome, fellow readers and enthusiasts, to the wondrous world of humanoid robots! Imagine a world where robots not only perform tasks but mimic human movements and behavior with uncanny precision. Well, hold onto your gears and prepare for a captivating adventure as we delve into the realm of programming a humanoid robot with 6 degrees of freedom in the arm, 6 in the leg, and 2 in the neck. And yes, we did it all with the help of our trusty MATLAB sidekick!
Now, you might be wondering, why would anyone go through the trouble of teaching a robot how to move like a human? Well, dear readers, the answer lies in the realm of endless possibilities. These intelligent and capable humanoid robots can be deployed in diverse applications, from industrial tasks to healthcare, education, and even entertainment. Just imagine a robot busting out the latest dance moves or engaging in interactive behaviors with better situational awareness. It’s like having a mechanical buddy who’s not only useful but also has killer moves on the dance floor!

To get familiar with MATLAB also read this!
Theoretical Basis and Design Concepts
But before we get carried away dreaming about robotic dance-offs, let’s talk about the aims of this extraordinary project. Our primary goal was to unravel the mysteries of human joint movement and its correlation with the body during motion. Armed with this knowledge, we set out on a quest to simulate human movement in the virtual world of MATLAB. Yes, folks, we programmed a robot to strut its stuff like a pro!
To achieve this feat, we embarked on a journey through various research methods. We dived into academic equations for forward and inverse kinematics, performing simulations using the mighty MATLAB software. We navigated through the theoretical basis of humanoid robots, combining principles from robotics, artificial intelligence, biomechanics, and cognitive science. Our quest led us to the Simulink and MATLAB framework, where we uncovered the secrets of modeling and simulating humanoid robot behavior.
About the Project
Forward Kinematics and Inverse Kinematics: Unraveling the Robot Motion
Picture this: importing humanoid robot models, visualizing their parts, and creating a simulation environment that allowed us to study their every move. We delved into the intricate world of kinematics and motion control, where we learned to model the robot’s movement, calculate joint angles, and plan efficient trajectories. We even dabbled in the realm of sensor integration and perception, exploring computer vision models, inertial sensors, and force sensors to bring our humanoid robot to life.
Leg Control: Stepping into the World of Leg Movement and Balancing
Now, imagine our robot’s impressive anatomy—a 6-degree-of-freedom arm, a 6-degree-of-freedom leg, and a 2-degree-of-freedom neck. These marvelous features allow our humanoid creation to perform a wide range of activities, interact with its surroundings, and display natural and coordinated motions that rival those of a human. And let’s not forget the neck joints, enabling the robot to modify its line of sight, focus on specific objects, and engage in interactive behaviors. It’s like having a mini Terminator with impeccable manners!
Head Control and Arm Control: Mastering the Art of Neck and Arm Motion
I’ll unveil the secrets behind the scenes—forward and inverse kinematics, leg control, head control, arm control, and even path planning using the dynamic window technique. Get ready to witness the magic of math and programming as we unravel the complex web of algorithms and techniques that bring our humanoid robot to life.
So fasten your seatbelts, folks, and join us on this exhilarating journey into the realm of humanoid robotics. We promise you laughter, learning, and maybe even a few robot dance-offs along the way. Welcome to the Robot Revolution—where science meets humor, and machines bust a move!
Simulation Model and Control Algorithms
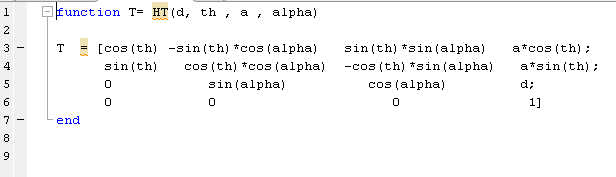
1. Forward and Inverse Kinematics
Kinematics, the dynamic duo of robot motion, are like the Batman and Robin of the robotic world. Forward kinematics swoops in, helping us uncover the secret location of the robot’s hand or foot. It’s like a GPS for mechanical limbs, guiding us to their exact coordinates. But when we need to play detective and figure out the joint angles needed to reach a specific spot, inverse kinematics leaps into action. It’s the Sherlock Holmes of robotics, deducing the precise angles and unraveling the mystery of how to achieve the desired position. Together, these kinematic heroes ensure our robot moves with grace and accuracy, saving the day one calculated step at a time.
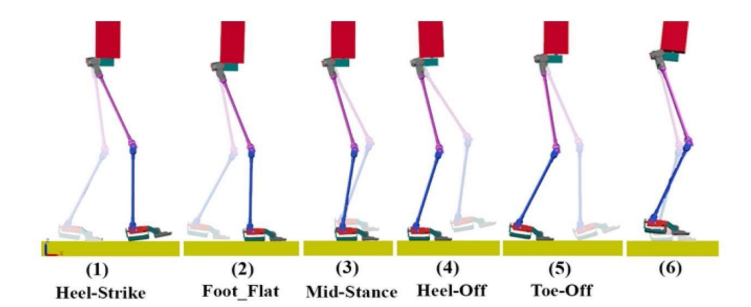
2. Leg Control: Keeping the Robot’s Feet Happy Feet
When it comes to leg control for our humanoid robot, we take our cues from the world of dance. Just like a seasoned ballerina, our robot needs to strike the perfect balance and maintain its poise. We make sure the robot’s legs are well-coordinated, executing moves with the grace of a professional dancer. It’s all about keeping those robotic feet happy and in sync with the rhythm of the dance floor. We don’t want any clumsy missteps here! So, we fine-tune the leg movements, ensuring the robot maintains its center of gravity and performs elegant strides worthy of a standing ovation. From toe to heel, we’ve got the leg control on pointe, giving our robot the confidence to hit the floor with style.
In the figure below, we know (𝑝1, 𝑅1) and (𝑝7, 𝑅7).

So, the position of the hip would be,
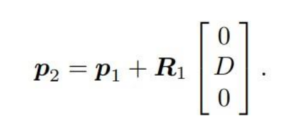
Next, we will calculate the position of the crotch viewed from the ankle coordinate space;
![]()
From this we can calculate the distance between the ankle and the hip, which we will define as;

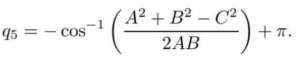
After transforming and calculating, we can get some valuable equations. The angle of the knees will be,

Another concerning parameter of leg movement is keeping center of body in the surface of the feet. Which calculate using the function below;


3. Head Control: The Robot’s Neck-tastic Moves
It’s time to give our humanoid robot the head-turning abilities that would make even an owl jealous! With our head control techniques, we’re taking neck-tastic moves to the next level. Just like a curious puppy, our robot can tilt, spin, and pivot its head with effortless flair. We’ve unlocked the secrets of simulated human neck movement, allowing the robot to be the ultimate spectator at any event. Whether it’s catching the attention of onlookers or giving a friendly nod, our robot’s head control is the epitome of “keeping an eye on the prize.” With a nod here and a tilt there, our robot is ready to conquer the world, one charismatic head movement at a time. Who knew neck exercises could be so entertaining?
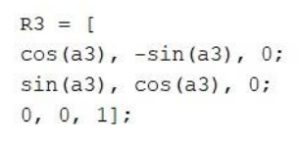
To rotate the angle as the formula:
Position of neck:
- px = l*s1
- py = 0
- pz = l*c1
Inverse kinematics of neck motion
theta1 = sin−1 𝑝𝑥 /𝑙1
where,
0° ≤ 𝑡ℎ𝑒𝑡𝑎2 ≤ 180°
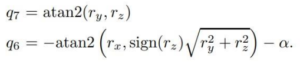
4. Arm Control: Unleashing the Robotic Jazz Hands
When it comes to arm control, our humanoid robot is ready to jazz things up with its mechanical limbs. Just like a seasoned performer, the robot can wave, reach, and grasp objects with a flair that would make any jazz musician proud. With precise control over its arm joints, our robot can strike the perfect balance between grace and dexterity. It’s like watching a symphony of motion as the robot’s arms glide through the air, creating harmonious movements that captivate the audience. Whether it’s a high-five or an intricate hand gesture, our robot’s arm control is a testament to its robotic finesse. So, get ready to be amazed as our robot unleashes its jazz hands, leaving you in awe of its rhythmic mastery. It’s time to embrace the robotic groove and let the arm control take center stage!
5. Path Planning: Navigating the Robotic Maze with Finesse
Our humanoid robot plays the role of a cunning explorer, equipped with a trusty map and possessing a knack for finding the best route. Path planning serves as our robot’s GPS, guiding it through the maze of obstacles with finesse and a dash of humor. Our robot exhibits a secret love affair with mazes, constantly seeking the most efficient path to reach its destination. Employing witty algorithms, the robot calculates the perfect twists and turns, skillfully avoiding collisions like a seasoned dodgeball player. The maneuvering through the unknown becomes a comical dance, showcasing the robot’s agility and quick thinking at every corner. So, let our robotic explorer take the lead, navigating life’s puzzling challenges with a touch of robotic charm.

Results:
the simulation of the project is

Challenges and Future Directions: Where Robots and Adventures Await!
As we embark on this robotic journey, it’s important to acknowledge the challenges that lie ahead. Just like climbing Mount Everest or solving a Rubik’s Cube blindfolded, programming humanoid robots comes with its own set of exhilarating obstacles. From intricate algorithms to fine-tuning motion control, we’re faced with a thrilling puzzle at every turn.
- One challenge we face is achieving seamless human-like movements. Sure, our robot can strut its stuff on the dance floor, but can it twirl like a pro? Can it mimic the fluidity of human gestures? It’s a tantalizing quest to make our robots move in ways that make you wonder if they secretly took dance lessons.
- Another hurdle is perfecting the art of interaction. Humans are social creatures, and we want our robots to be the life of the party! Can our robots engage in meaningful conversations, understand emotions, and respond with a touch of wit? Creating that perfect blend of intelligence and charm is a riddle waiting to be solved.
And let’s not forget the adventure that awaits in uncharted territories.
Conclusion: Unleashing the Potential of Humanoid Robots
As we conclude this journey through the world of humanoid robots, it’s clear we’re witnessing something extraordinary. These mechanical marvels have evolved into agile beings that dance, interact, and captivate our imaginations. By harnessing the power of programming, we’ve unlocked their potential, enabling intricate movements and diverse tasks. They’re our innovation partners, ready to tackle future challenges with grace and agility.
But let’s not forget the fun and laughter they’ve brought along the way. Who knew that robots could have a sense of humor? Whether it’s their quirky dance moves or their witty responses, these humanoid robots have become our hilarious companions in this grand adventure.
So, let’s raise a toast to the brilliant minds behind these extraordinary creations and to the humanoid robots themselves. They remind us that even in a world of wires and circuits, there’s room for wonder, laughter, and the boundless joy of discovery.
Cheers to the incredible world of humanoid robots, where the fun never ends and the adventure never ceases!